ミエナイトデンワ
~見えない糸電話~ Invisible string telephone
遠く離れた所に住む人大切な人とお互いに空間的に向かい合ったときだけ話ができる見えない糸で結ばれた糸電話「ミエナイトデンワ」を作りました。
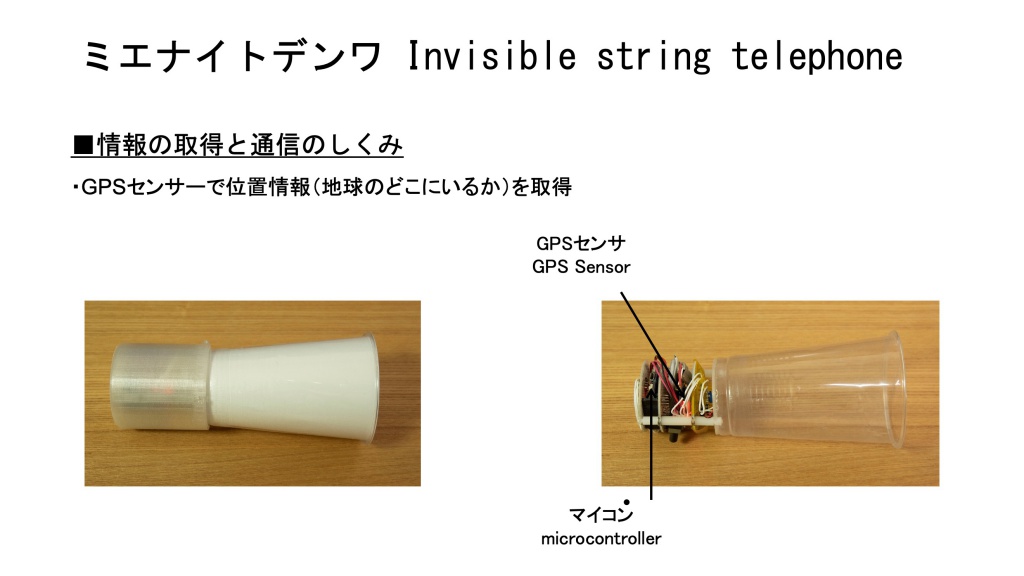
「ミエナイトデンワ」は紙コップ型のデバイスで2つが対(つい)になっています。
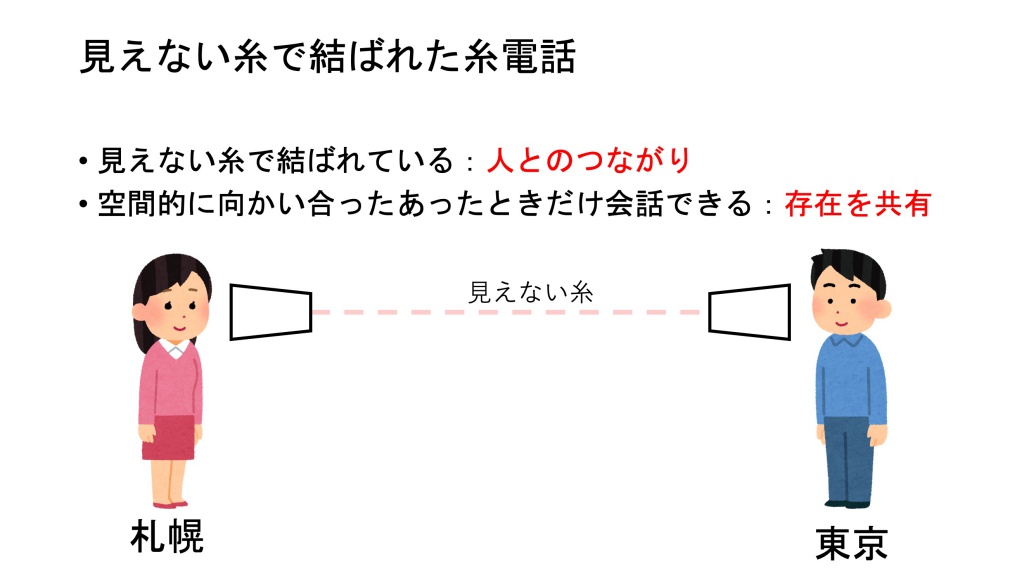
糸電話を使うように使用します。例えば、東京にいる自分と北海道にいる自分が会話するときは、東京にいる自分は北海道の相手のいる方向を、北海道にいる相手は自分のいる東京の方向を向き、糸電話を使って会話をするときのように、お互いが空間的に向かい合い、「ミエナイトデンワ」の間に張られた見えない糸がピンっと張った状態になったときだけ会話ができます。
普段の電話では相手がどこにいるか、何をしているかを意識することはほとんどありませんが、「ミエナイトデンワ」で見えない糸で結ばれている状況や、相手と向かい合っている状況(このコップの先に会話の相手がいるという状況)を作り出すことで、普段のネットワーク越しの会話では得ることができない相手との繋がりや相手の存在を強く感じながら会話することが可能となります。
背景
スマートフォン(電話)やスカイプ、Web会議アプリを使って、相手がどこにいても簡単に相手と話すことができるようになった。そのときに相手がどこにいるのかということを意識することはほとんどない。また電話の場合は別のことをしながら電話すること(いわゆる「ながら電話」)も多く、たとえ遠くに住む人と話していても、特別な感情を抱くことはほとんどない。遠く離れたところに住む人、特に大切な人との電話を特別な時間にして、相手との繋がりや相手の存在をを強く意識しながら会話できるデバイスを作りたいと考えた。特にこのデバイスを作っていたときに、新型コロナウィルスの感染感染が世界的に広がり、大切な人だからこそ会えないという状況が続いていたこともあり、人と人との繋がりを感じるデバイスの必要性を感じていた。
そこで考えたのが、遠く離れた人と会話できる見えない糸で繋がれた糸電話を使って会話するというコンセプトである。糸電話は誰もが一度は遊んだことのあり、使い方をだれもが想像できるということ、そして糸電話のコンテキストには
- 相手と糸で結ばれている
- 会話ができるのは相手と向かい合ったとき(糸がピンと張ったとき)だけ
である。つまり糸電話で話すときは2人が必ず向かい合い、そしてその間を糸がつながった状態になるのである。遠く離れた2人、見えない糸で繋がった糸電話を使つかって話すことができれば、相手との繋がりや存在を強く感じながら会話ができると考えた。
今回開発した「ミエナイトデンワ」は、コップ型(紙コップの底に取り付ける)をしており、対となる2つのコップの底が見えない糸で結ばれている(ようにふるまう)ように設計・プログラムされている。例えば遠くの県や海外に住んでいる人と会話するときに「ミエナイトデンワ」を使えば、どんなに遠く離れていても、相手と空間的に向かい合ったときだけ、相手と会話をすることができる。会話をしながら、この先に相手がいるという感覚(存在の共有)や、見えない糸で繋がっている(人とのつながり)を強く感じながら会話をすることができる。私も実際に神奈川県の自宅から地元の石川県にいる地元の友人「ミエナイトデンワ」を使って会話をしてみたが、空間を越えて相手と向かい合っている状況で会話するという体験はとても新鮮であり、相手の存在を感じながら会話をすることができた。そもそも、自宅から地元、石川がどちらの方向にあるのかということを考えたことさえなかったため、その体験されも新鮮であった。
「ミエナイトデンワ」は実際に見えない糸で結ばれているわけではない。体験者が見えない糸で結ばれている糸電話のように感じられるように、回路設計やプログラミングを駆使して製作している。GPSセンサを使って自分のいる位置情報を計算し、加速度センサと地磁気センサを使ってコップの姿勢状況や方位を計算し、コップの底が相手のいる方向と直線で結ばれ、向かい合った状態になったときだけ相手と会話ができるようにプログラムしている。
以下、詳細
仕組み
見えない糸で結ばれているといっても、実際に見えない糸が存在しているわけではありません。
“遠くにいる相手と向かい合い、見えない糸がピンと貼ったときに会話ができる状態”を作ることによって、見えない糸があたかも存在しているように感じるようにしています。
まず、「ミエナイトデンワ」はGPSセンサーを使って、自分の地球上の位置を取得しています。GPS情報を使って相手との地球上の位置関係を計算しています。
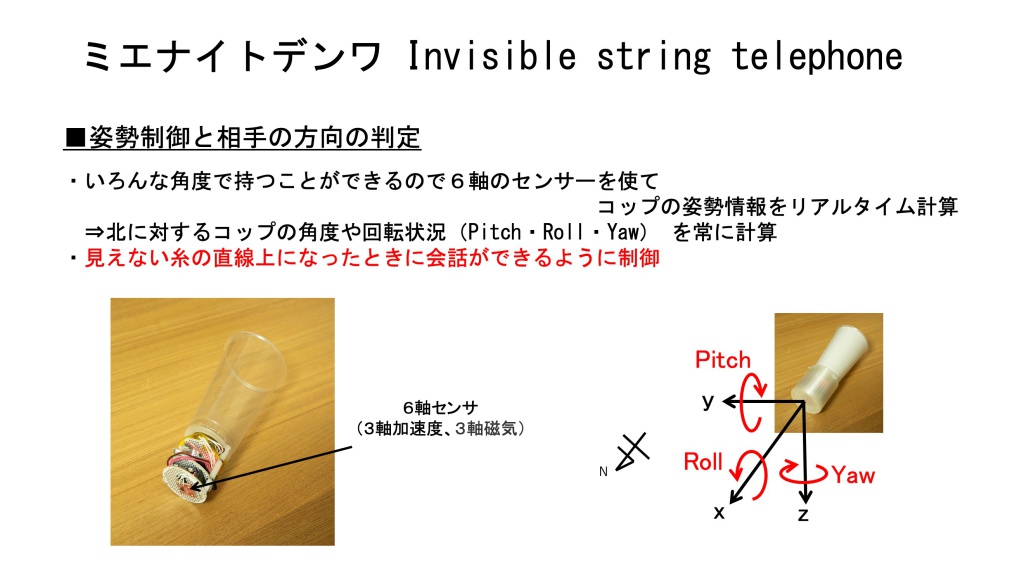
ミエナイトデンワは紙コップ型デバイスのため、手に取ったときに様々な持ち方(上下左右が回転する)ができてしまいます。(少し難しい話になりますが、その状態では、「ミエナイトデンワ」の姿勢の基準となるxyz軸が回転してしまい、相手が存在している方向を向いているかどうかを計算することが困難です。)そこで6軸のセンサー(3軸の加速度センサーと3軸の磁気センサー)を使って、糸電話がどういう姿勢(xyzの各軸に対する回転)で空間に存在しているか、そして、北(方角の基準)に対して何度傾いた状態になっているかを計算しています。ロボットなどに姿勢制御技術を使っていると思っていただければよいと思います。
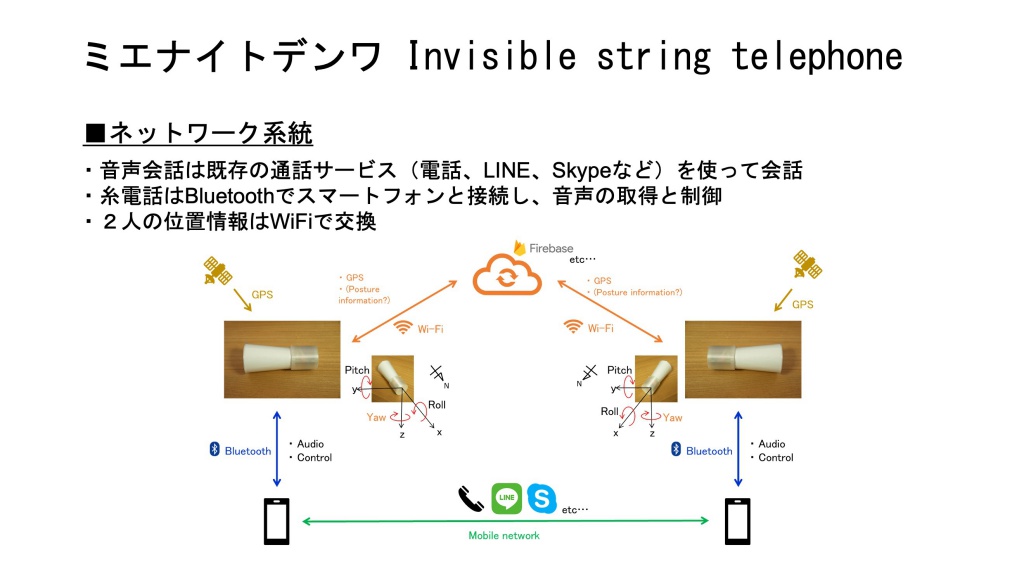
自分の地球上の位置と姿勢が分かれば、あとは相手の位置情報がわかれば、相手の位置情報さえわかれば、向かい合っているかどうかを計算することができます。そして、相手と向かい合った状態(見えない糸の直線上になったとき)に会話ができるように制御します(詳しい制御は後程出てきます)。相手の位置情報は事前にミエナイトデンワに登録しておくこともできますが、既存のクラウドサービス(例えばGoogleのFirebase)を利用して、お互いの位置情報を交換することで、相手や自分が移動して大丈夫な状態を作ることができます。今回Wifiモジュールが搭載されているマイコンを使って互いの位置情報をやり取りしています。詳細はネットワーク図をご確認ください。
音声は既存の通話サービス(スマホの電話やLINE、Skype)を利用しています。最初、音声をやり取りするものを一から構築することも考えましたが、非常に難しく、システムのうんようにも高額な費用が掛かるため、既存のサービスを利用することで、その問題を解決しています。
まず、既存の通話サービスでお普段から使っている互いのスマートフォンを会話できる状態にしておきます。ミエナイトデンワはBluetoothを使って自分のスマートフォンのペアリングさせ、音声を取得します。ミエナイトデンワは自分のGPS情報、相手のGPS情報、自分の姿勢情報から、相手と向かい合った状態のときだけ音声が聞こえる状態にし、角度がずれると音を聞こえない状態(ミュートの状態)にします。こうすることであたかも見えない糸で繋がっており、その糸がピンと張ったときだけ会話ができる状態を作り出しています。
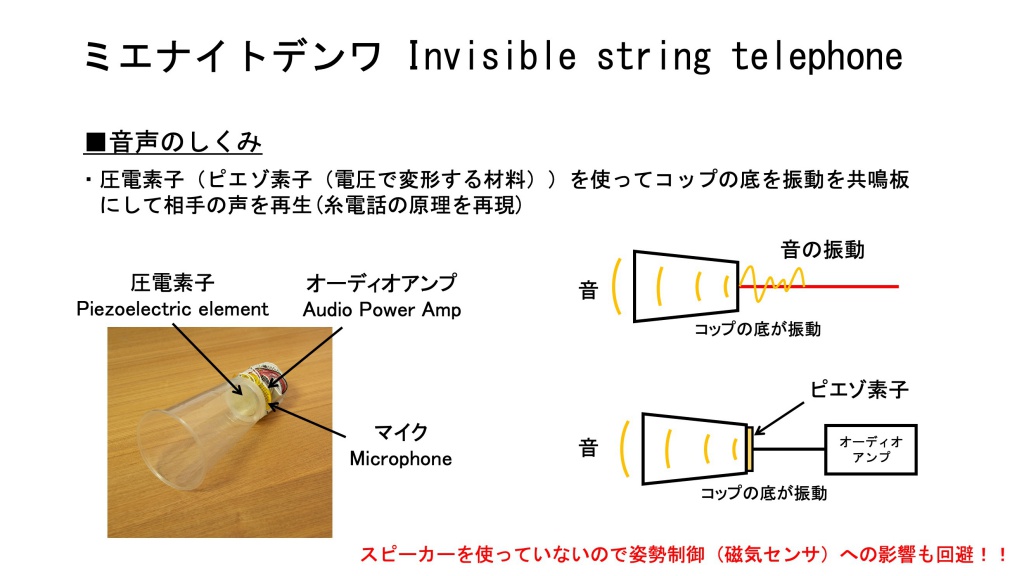
音はスピーカーを使うのではなく、圧電素子を紙コップの底に張り付け、紙コップの底を直接振動させることで音を出しています。音質はスピーカーの音よりも悪くなりますが、糸電話と同じく紙コップの底を振るわせて音を出しているため、糸電話に近いこもった音を再現しています。また、スピーカーは磁石を使用しているため、姿勢制御に用いる磁気センサーに影響を与えてしまいますが、圧電素子を用いることでその影響も回避しています。
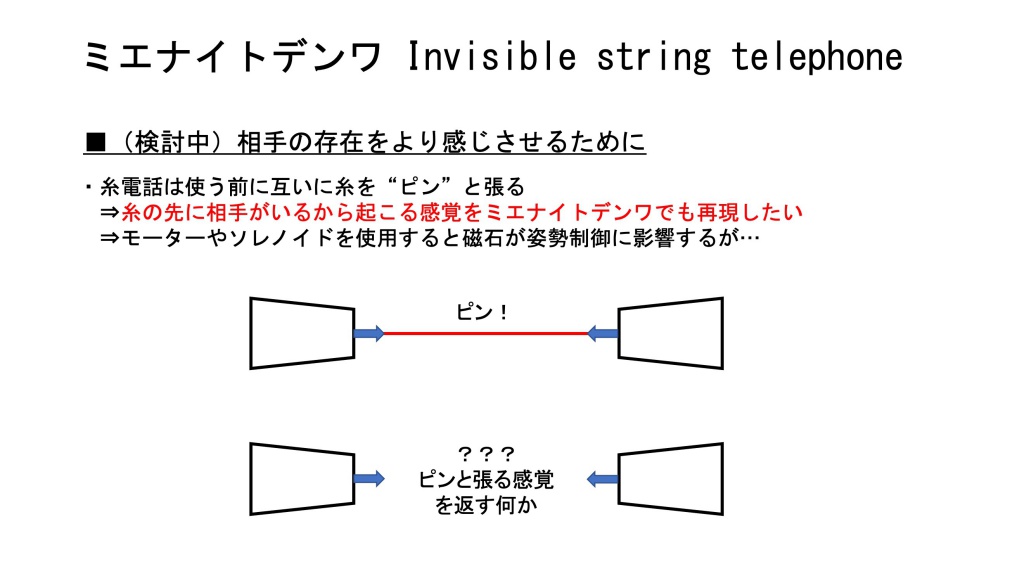
今は音が聞こえるかどうかで互いが向き合っているかどうかを確認しています。声だけでも、かなり面白い体験ではありますが、より見えない糸の存在を強く感じさせる方法として、お互いが向かい合い、見えない糸がピンと張ったことがわかるように、糸が張った感覚をコップの底にフィードバックする方法を検討しています。こちらについてはまだ未実装ではありますが、今後搭載できればと考えています。その際も安易にモーターを入れてしまうと、そこから発生する磁場によって磁気センサーに影響を与えるため、良い方法を考える必要があります。